
Dejar un mensaje
Si está interesado en nuestros productos y desea conocer más detalles, deje un mensaje aquí, le responderemos lo antes posible.

Actualmente, las tecnologías de posicionamiento GPS y de estaciones base satisfacen básicamente las necesidades de los usuarios de servicios de localización en exteriores. Sin embargo, las personas pasan el 80 % de su vida en interiores, y es difícil lograr un posicionamiento óptimo con la tecnología de posicionamiento satelital en zonas interiores muy oscuras, como túneles, puentes bajos, calles con muchos edificios altos y vegetación densa.
Para abordar el problema de la localización en estos escenarios, el equipo del profesor asociado Chen Rui, de la Universidad de Ciencia y Tecnología Electrónica de Xi'an, publicó un artículo titulado "Localización de vehículos en tiempo real basada en UHF-RFID en entornos sin GPS" en IEEE TRANSACTIONS ON INTELLIGENT TRANSPORTATION SYSTEMS. "Localización en entornos sin GPS", donde se propone un nuevo esquema de localización de vehículos en tiempo real basado en UHF-RFID, un método de localización basado en la diferencia de fase de señales multifrecuencia, que resuelve el problema de la ambigüedad de fase causada por el uso de señales de una sola frecuencia para la localización y propone por primera vez un algoritmo de localización basado en la estimación de máxima verosimilitud. Se propone el primer algoritmo de localización basado en el teorema del resto chino, y se utiliza el algoritmo Levenberg-Marquardt (LM) para optimizar las coordenadas de la posición objetivo. Los resultados experimentales muestran que el esquema propuesto puede rastrear la posición del vehículo con un error inferior a 27 cm con una probabilidad del 90 %.
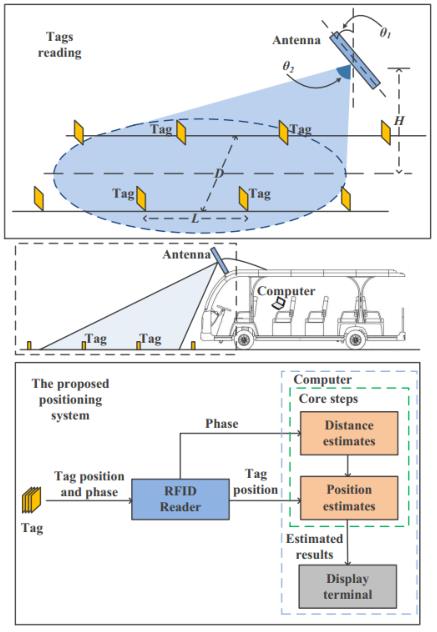
Se informa que el sistema de localización de vehículos consta de un Etiqueta UHF-RFID Se coloca en la carretera, un lector RFID con antena montada en la parte superior del vehículo y un ordenador de a bordo. Cuando el vehículo circula por dicha carretera, el lector RFID puede obtener la fase de las señales retrodispersadas de múltiples etiquetas y la información de ubicación almacenada en cada etiqueta en tiempo real. Dado que el lector transmite una señal multifrecuencia, puede obtener múltiples fases correspondientes a las diferentes frecuencias de cada etiqueta. El ordenador de a bordo utilizará esta información de fase y posición para calcular la distancia desde la antena hasta cada etiqueta RFID y, a continuación, determinar las coordenadas del vehículo.
En el futuro, la ciudad cambiará su forma cuando la red sea omnipresente y la tecnología de localización pueda integrarse en cualquier dispositivo. La innovación continua en el campo de los servicios de localización en interiores, mediante la aplicación de diversas tecnologías, traerá más sorpresas y posibilidades para toda la era del IoT.




 Red IPv6 compatible
Red IPv6 compatible
Chatea ahora
Escanear a WeChat :

Escanear a WhatsApp :

 CATEGORÍAS DE PRODUCTOS
CATEGORÍAS DE PRODUCTOS




